[일본] 게이오대, 32개의 다리를 가진 로봇인 Mochibot 개발
2018-11-09 오전 11:59:07

일본 게이오대(Keio University)에 따르면 도쿄대(University of Tokyo)와 협업해 'Mochibot'이라고 불리는 32개의 다리를 가진 로봇을 개발했다.
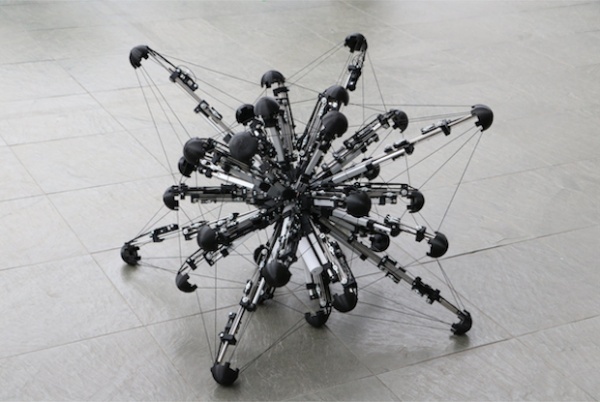
연구 프로젝트는 미국 나사(NASA)의 Innovative Advanced Concepts 프로그램의 보조금을 지원받아 진행했다.로봇의 외견은 구형이지만 실제로는 마름모 - 삼각형 교차체 프레임 워크를 기반으로 제작됐다.
Mochibot의 무게는 10kg이며 크기는 최대 확장시 약 1미터, 축소시 약 0.5미터이다. 32개 다리는 아메바가 움직이는 방식과 비슷하게 움직일 수 있다.
로봇의 다리에 선형 액추에이터를 끼워 넣었기 때문이다. 이 이동 방법을 사용하면 로봇이 방향을 바꾸지 않고도 지정된 방향으로 이동할 수 있다.
Mochibot은 외계 탐사에 사용될 수 있을 것으로 기대된다. 나사의 슈퍼볼 봇(Super Ball Bot)이라고 불리는 tensegrity 디자인에 비해 다음과 같은 장점을 갖고 있기 때문이다.
첫째, Mochibot은 간단한 프로그래밍 또는 경로를 손가락으로 추적하는 방식을 통해 모든 방향으로 이동할 수 있다. 슈퍼볼 봇의 이동 방법은 매우 복잡하며 가장 단순한 경로에서도 정교한 기계 학습 알고리즘을 필요로 한다.
둘째, Mochibot은 한쪽 다리가 부러지더라도 나머지 31개의 다리를 통해 이동할 수 있다. 수퍼볼 봇의 경우에는 하나의 액추에이터 또는 탄성 케이블이 고장나면 수리할 때까지 움직일 수 없다.
셋째, Mochibot은 모래 또는 느슨한 바위와 같은 불안정한 지형에 매우 적합하다. 안정된 상태를 유지하기 위해 필요에 따라 다리를 확장하거나 축소할 수 있기 때문이다.
향후 연구팀은 고르지 않은 지형에서 로봇이 어떻게 임무를 수행되는지와 로봇이 오르막길, 암석 및 횡으로 빠져 나갈 수 있는지 여부를 연구할 계획이다.
▲ Japan-Mochibot-robot-32legs-homepage
▲게이오대의 Mochibot(출처 : 홈페이지)
연구 프로젝트는 미국 나사(NASA)의 Innovative Advanced Concepts 프로그램의 보조금을 지원받아 진행했다.로봇의 외견은 구형이지만 실제로는 마름모 - 삼각형 교차체 프레임 워크를 기반으로 제작됐다.
Mochibot의 무게는 10kg이며 크기는 최대 확장시 약 1미터, 축소시 약 0.5미터이다. 32개 다리는 아메바가 움직이는 방식과 비슷하게 움직일 수 있다.
로봇의 다리에 선형 액추에이터를 끼워 넣었기 때문이다. 이 이동 방법을 사용하면 로봇이 방향을 바꾸지 않고도 지정된 방향으로 이동할 수 있다.
Mochibot은 외계 탐사에 사용될 수 있을 것으로 기대된다. 나사의 슈퍼볼 봇(Super Ball Bot)이라고 불리는 tensegrity 디자인에 비해 다음과 같은 장점을 갖고 있기 때문이다.
첫째, Mochibot은 간단한 프로그래밍 또는 경로를 손가락으로 추적하는 방식을 통해 모든 방향으로 이동할 수 있다. 슈퍼볼 봇의 이동 방법은 매우 복잡하며 가장 단순한 경로에서도 정교한 기계 학습 알고리즘을 필요로 한다.
둘째, Mochibot은 한쪽 다리가 부러지더라도 나머지 31개의 다리를 통해 이동할 수 있다. 수퍼볼 봇의 경우에는 하나의 액추에이터 또는 탄성 케이블이 고장나면 수리할 때까지 움직일 수 없다.
셋째, Mochibot은 모래 또는 느슨한 바위와 같은 불안정한 지형에 매우 적합하다. 안정된 상태를 유지하기 위해 필요에 따라 다리를 확장하거나 축소할 수 있기 때문이다.
향후 연구팀은 고르지 않은 지형에서 로봇이 어떻게 임무를 수행되는지와 로봇이 오르막길, 암석 및 횡으로 빠져 나갈 수 있는지 여부를 연구할 계획이다.
▲ Japan-Mochibot-robot-32legs-homepage
▲게이오대의 Mochibot(출처 : 홈페이지)
저작권자 © 엠아이앤뉴스, 무단전재 및 재배포 금지